Trinity College Firefighting robots
The main challenge of the Trinity College Fire Fighting Robot Contest was to build an autonomous computer-controlled robot that can find its way through an arena that represents a model house, find a lit candle that represents a fire in the house, and extinguish the fire in the shortest time. This task simulates the real-world operation of an autonomous robot performing a fire protection function in a real house. The robot must be smaller than 12" per side.
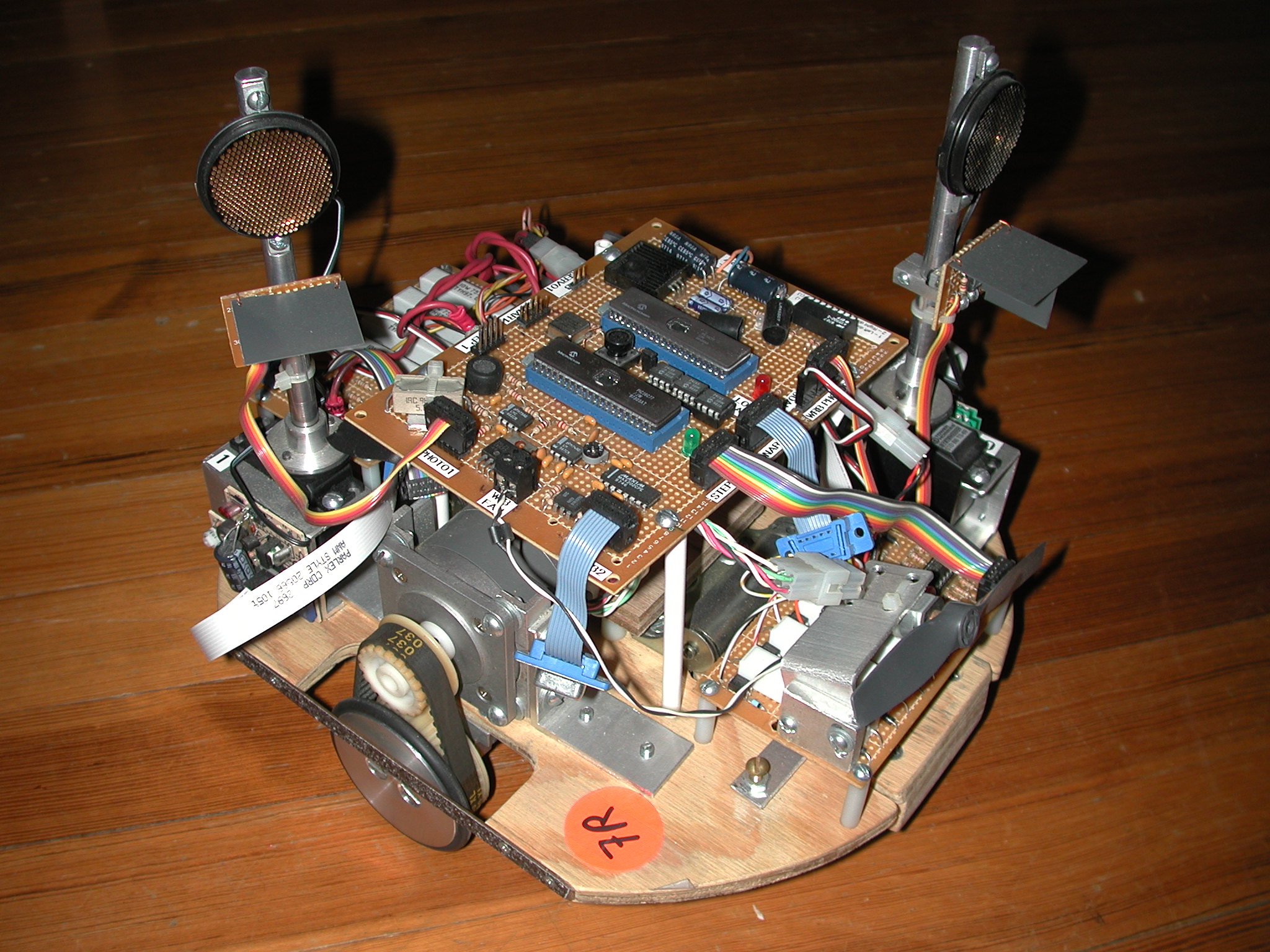
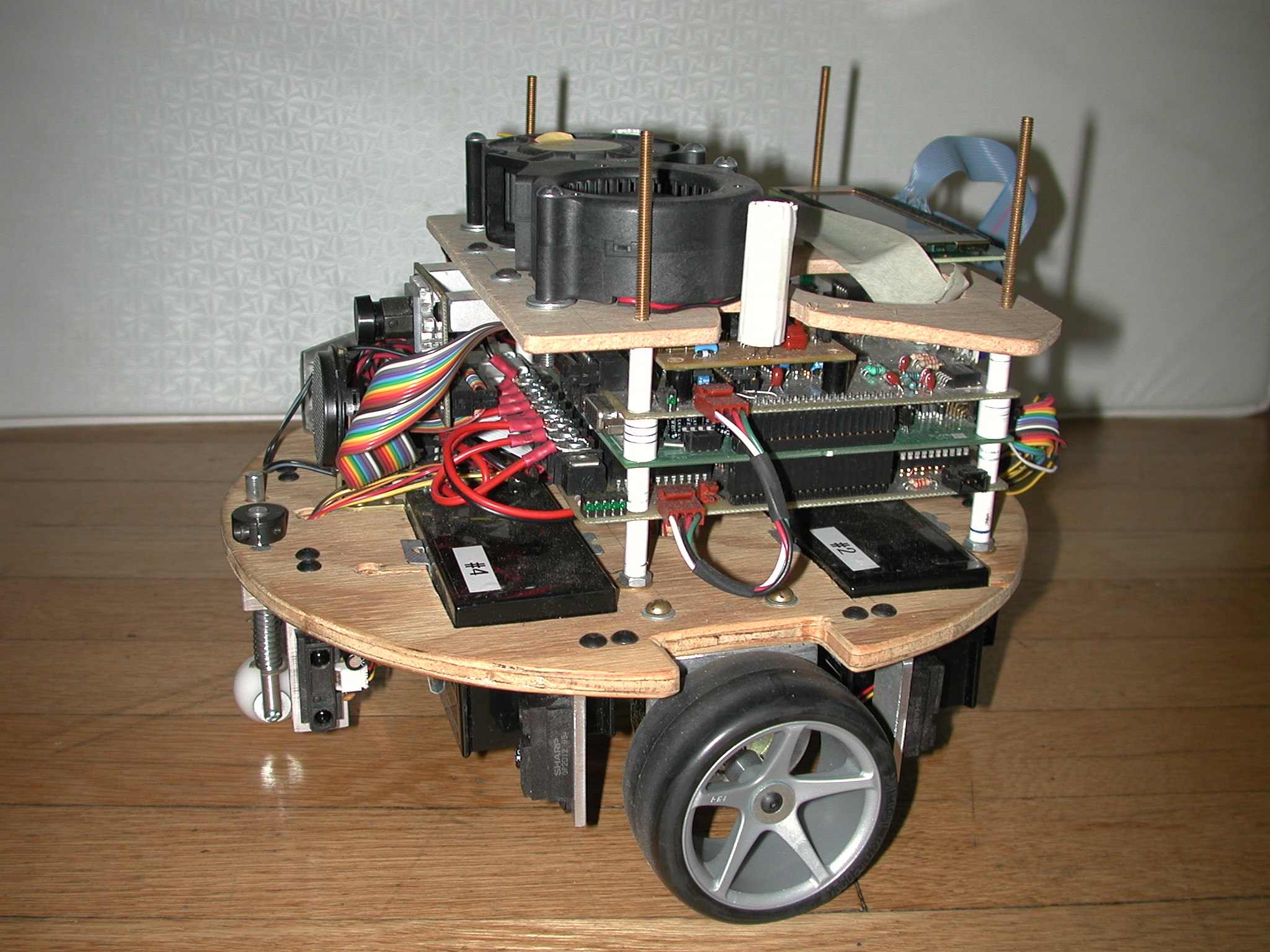
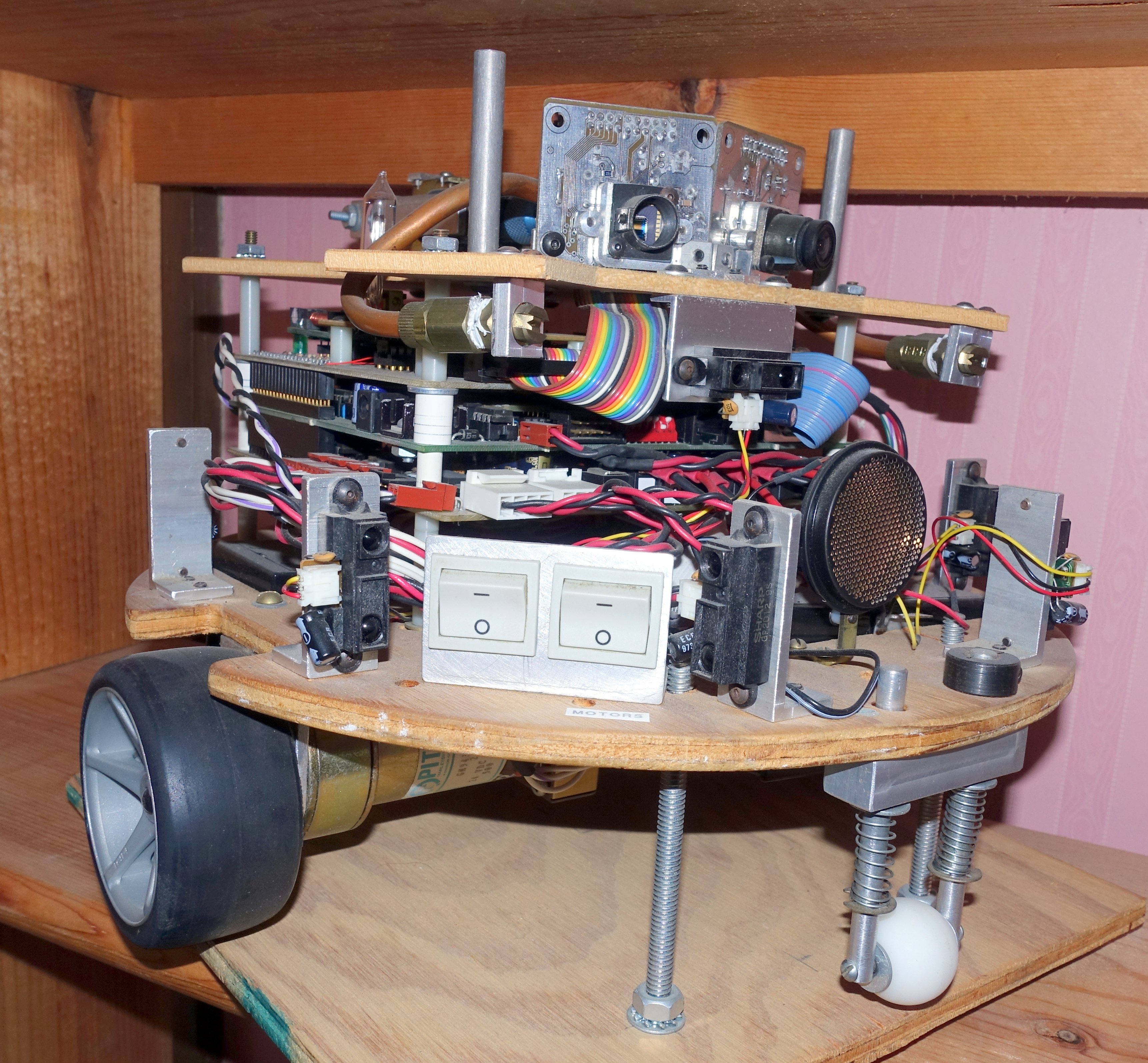
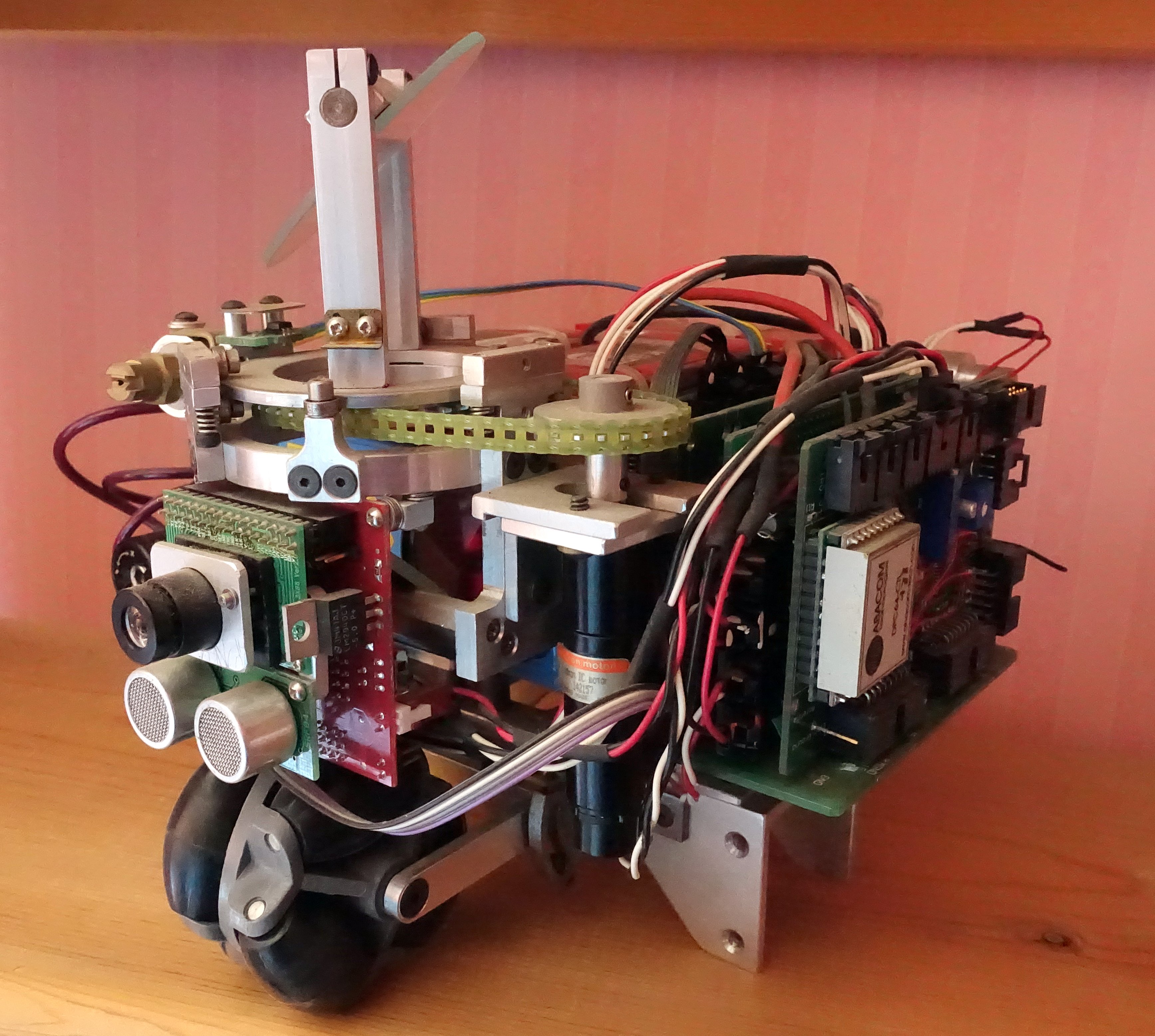
I have entered three robots in this contest using different technologies including scanning ultrasonic, infrared, and laser rangefinders, computer vision, ultraviolet flame sensors, and electromechanical carbon dioxide dispensers. These have all been differential drive robots, but now I am fiddling around with a three-wheeled holonomic, synchro drive base for a possible future entry.
The day before the contest, competitors prepare at long rows of tables in a Trinity college gym. Although it is a frantic rush to get our robots working on site, it is inspiring to walk around the gym and see how other people have attacked the many aspects of the challenge.