
NASA sample collecting robot
I entered this robot in the 2016 NASA Sample Return Robot Challenge. The rules describe the challenge:
The objective of the challenge was to develop new technologies or apply existing technologies in unique ways to create robots that can autonomously seek out samples and return to a designated point in a set time period. Robots will be required to navigate over unknown terrain, around obstacles, and in varied lighting conditions to identify, retrieve, and return these samples.
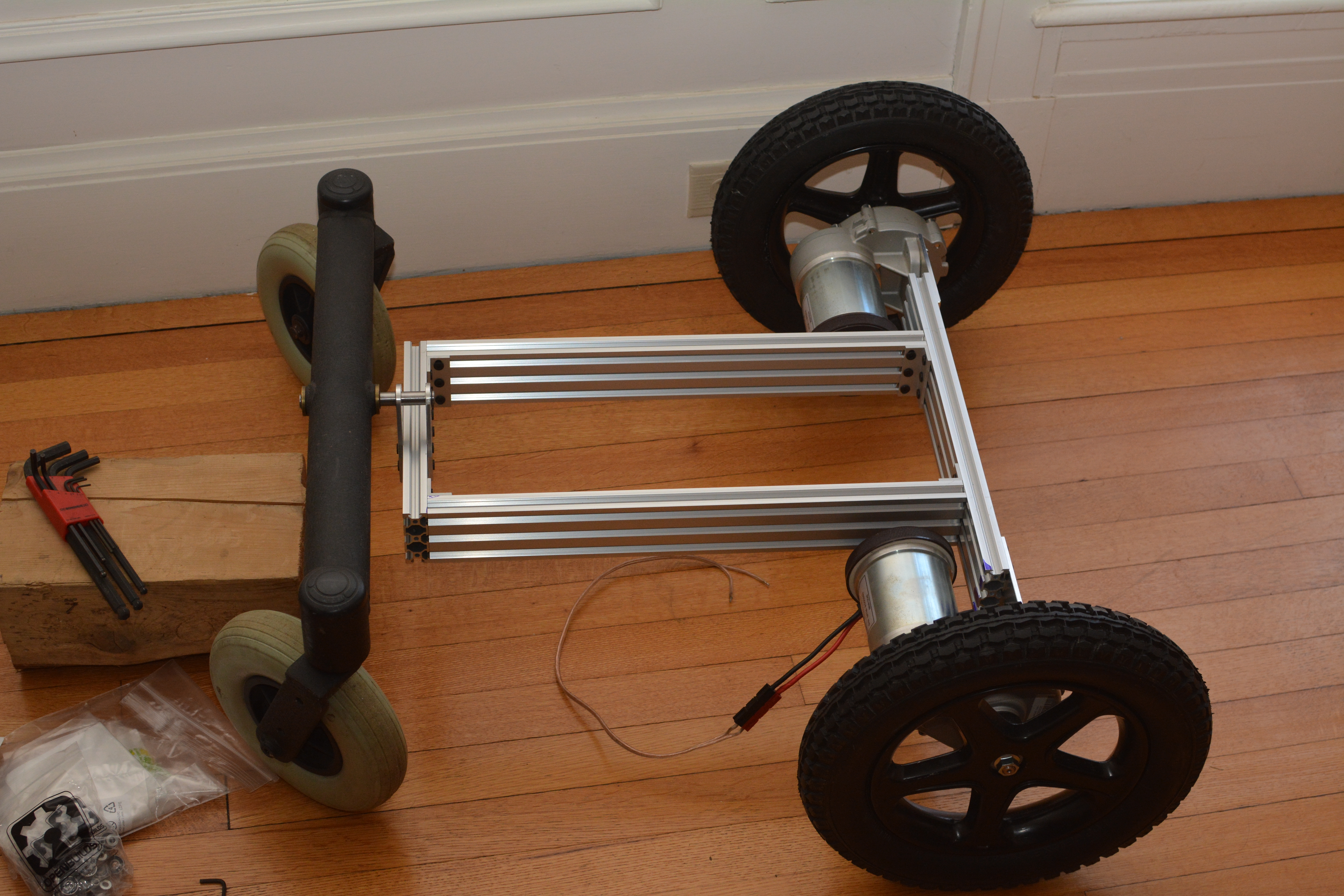
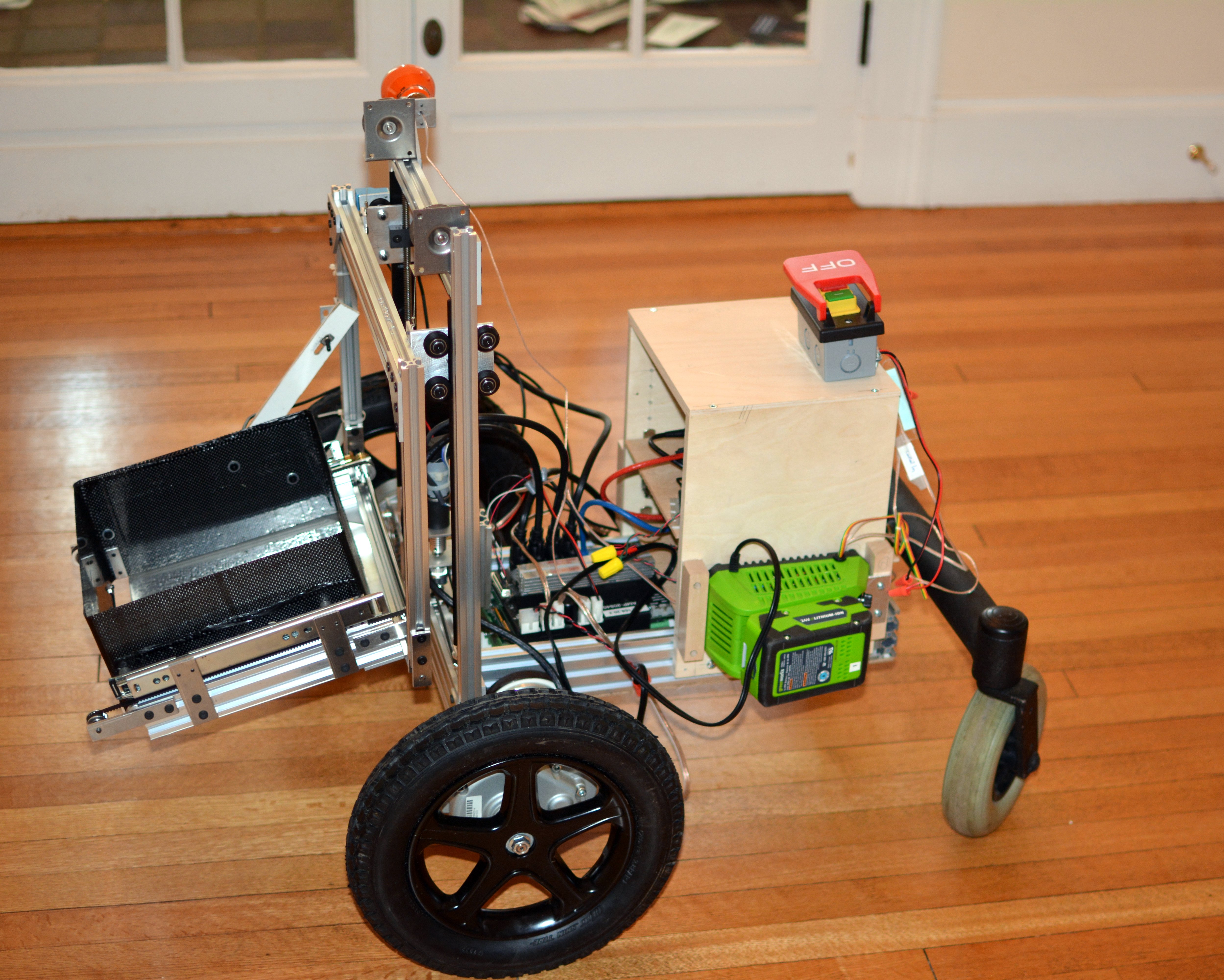
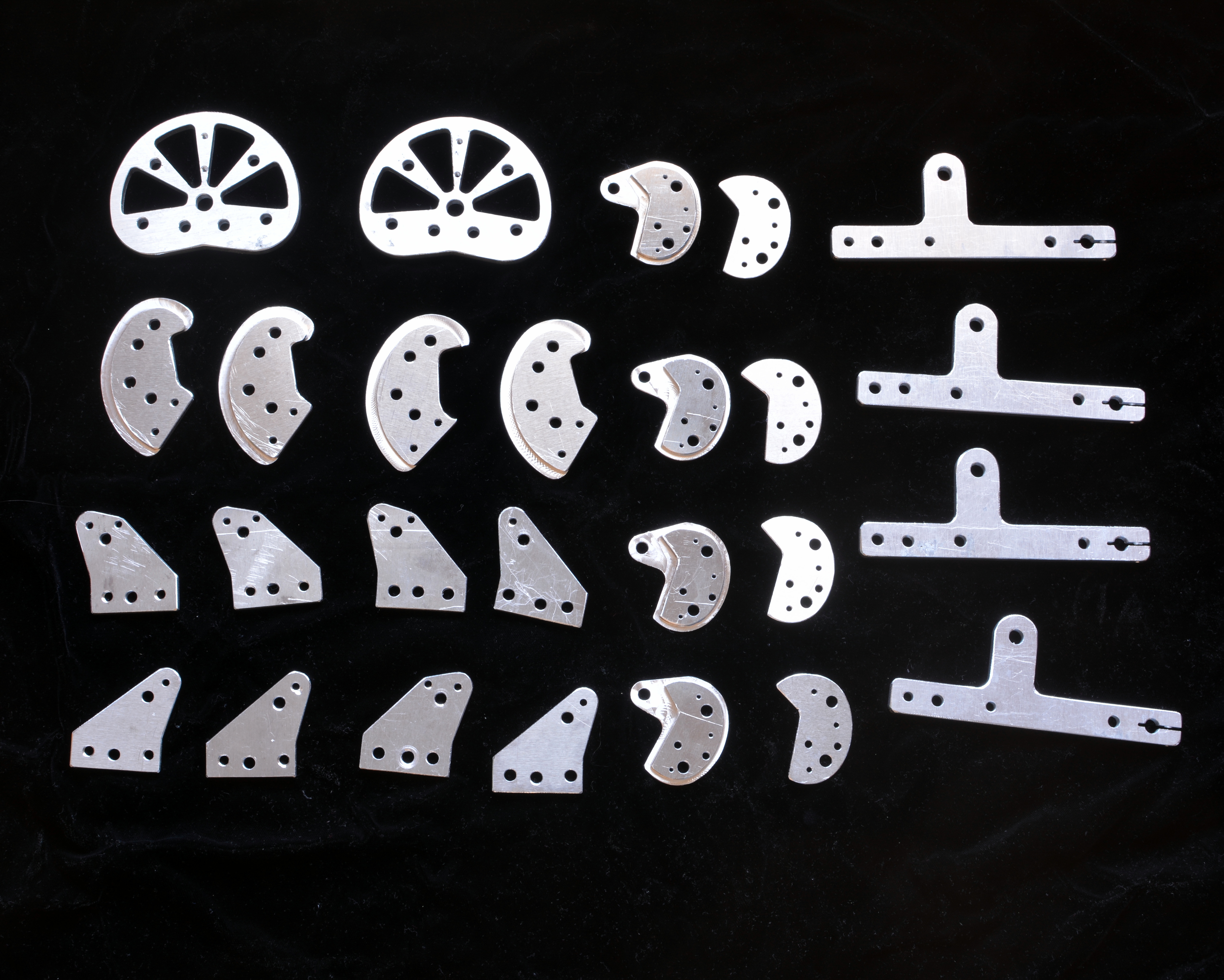
There were many interesting aspects to this challenge. The robot incorporated several cameras, scanning LIDAR, wheelchair motors with encoders added, and infrared distance sensors. It had an onboard Intel NUC, router and used Linux and ROS.
I thought that it would be important to have a robust computer vision system with which to find and identify samples. This would be complicated by the unstructured lighting conditions at the competition site. The competition took place in a field with many shadows from trees and other objects as well as unpredictable weather.
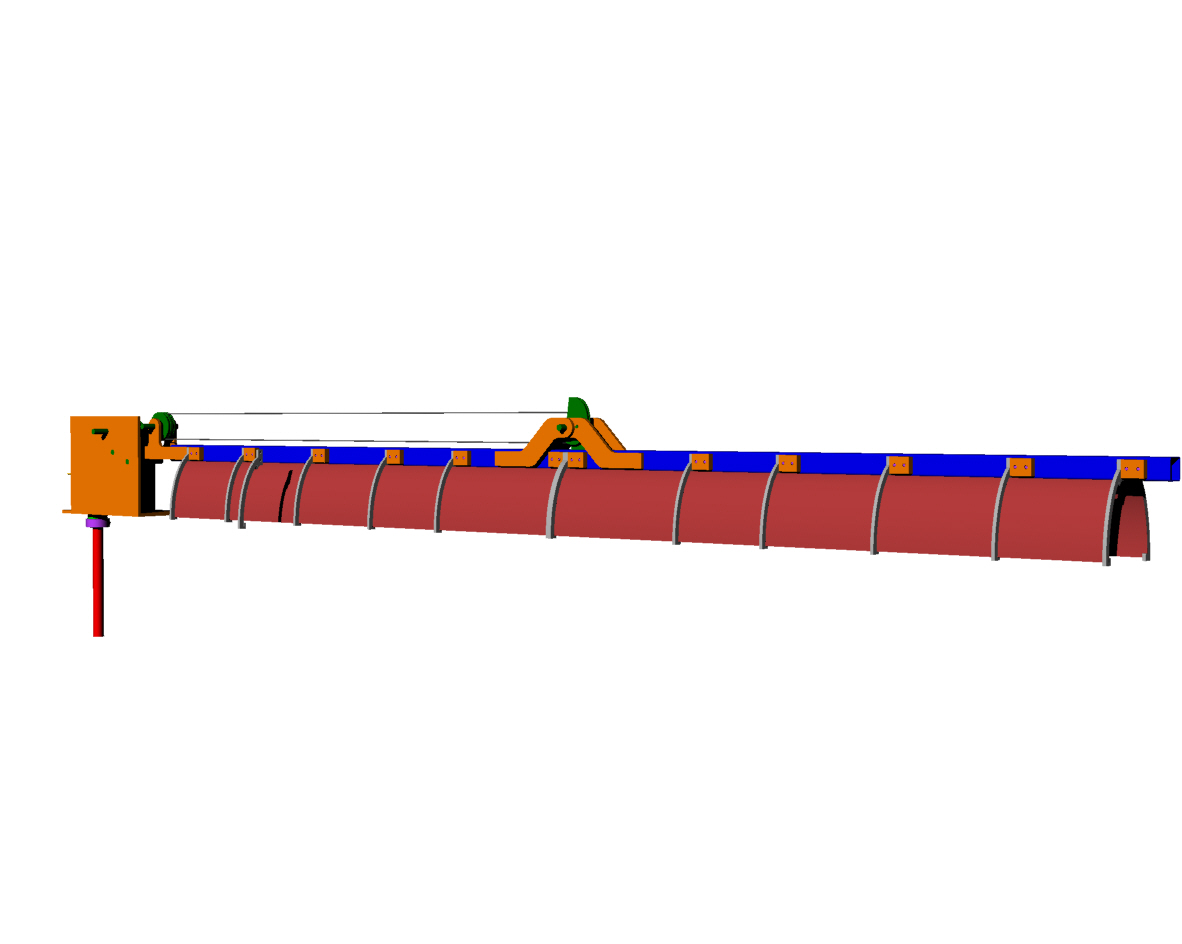
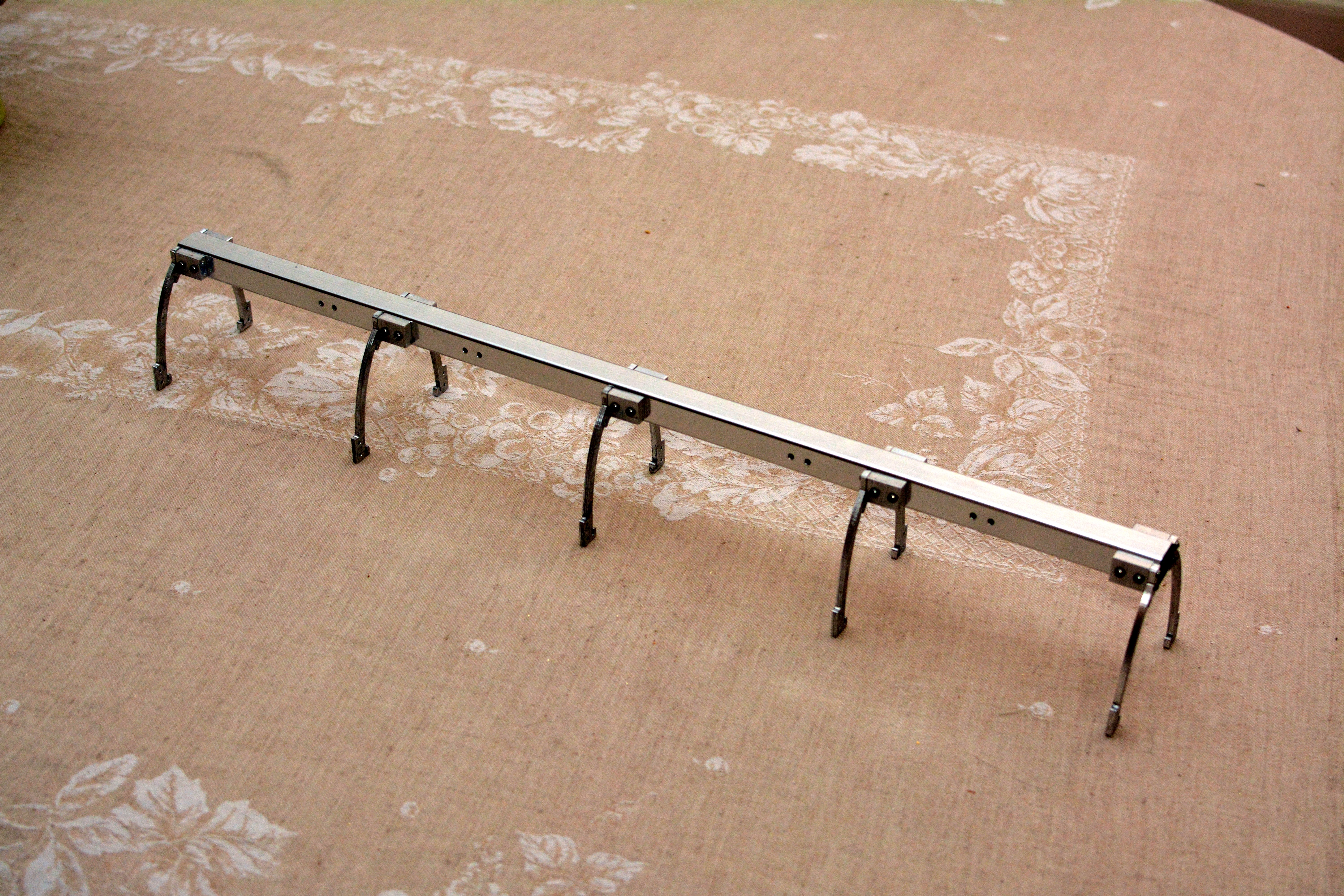
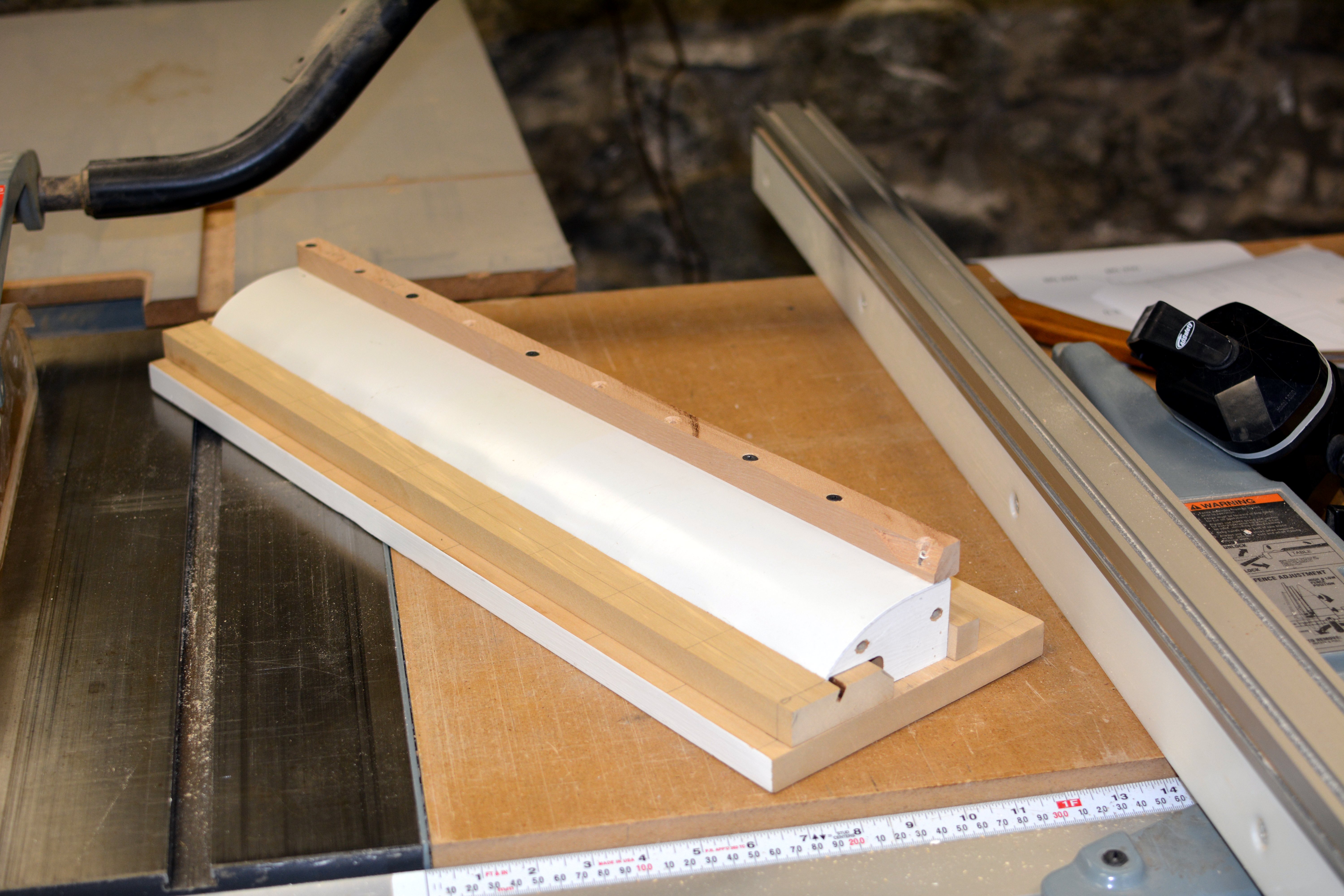
My idea was to minimize the uncertainty in the lighting by building a robot which was essentially a scanner. It would deploy long arms from the sides with lights and cameras facing down. In this way, the lighting could be controlled and, with long arms, a large area could be scanned in each pass.
It was exciting to see the wide variety of robots at the competition and the different ways other people addressed the problems.
-
-
-
-
-
-
-

-
Radio-controlled test of platform
-
Indoor sample collection test (with a little help)
-
Indoor sample collection on astroturf
-
On-site indoor test
-
Almost successful on-site field test